Главная >> Фейнмановские лекции по физике >> Том 6 >> Глава 26. Лоренцевы преобразования полей Релятивистское преобразование полей В предыдущем параграфе мы вычисляли электрическое и магнитное поля, исходя из трансформационных свойств потенциалов. Но, несмотря на приведенные ранее аргументы в пользу физического смысла и реальности потенциалов, поля все же важнее. Они тоже реальны, и для многих задач было бы удобно иметь способ вычисления полей в движущейся системе, если поля в некоторой «покоящейся» системе уже известны. Мы имеем законы преобразования для φ и А, поскольку Аμпредставляет собой четырехвектор. Теперь нам хотелось бы найти законы преобразования Е и В. Пусть мы знаем векторы Е и В в одной системе отсчета. Как же они выглядят в другой системе, движущейся относительно первой? Здесь-то нам и понадобятся преобразования. Конечно, мы всегда можем сделать это через потенциал, но иногда удобно уметь преобразовывать поля непосредственно. Сейчас мы увидим, как это делается.
Как можно найти закон преобразования полей? Нам известны законы преобразования φ и А, и мы знаем, как выражаются поля через φ и А, так что отсюда нетрудно найти преобразования для Е и В. (Вы можете подумать, что у каждого вектора есть нечто, дополняющее его до четырехвектора, так что, например, с вектором Е можно связать некую величину, которая сделает его четырехвектором. То же самое относится и к В. Увы, это не так. Все оказывается совершенно непохожим на то, что можно было бы ожидать.) Для начала возьмем магнитное поле В, которое, конечно, равно vxA. Теперь мы знаем, что х-, у- и z-компоненты векторного потенциала — это только одна часть, помимо них есть еще и t-компонента. Кроме того, мы знаем, что у аналога оператора v наряду с производными по х, у и z есть также производная по t. Давайте же попытаемся найти, что получится, если мы произведем замену у на t, или z на t, или еще что-нибудь в этом духе.
Прежде всего обратите внимание на форму слагаемых, образующих компоненты В:
 |
В слагаемые, образующие x-компоненту В, входят только z- и y-компоненты А. Предположим, мы назвали эту комбинацию производных и компонент «zy-штукой», или сокращенно Fzy . Мы просто имеем в виду, что
Подобной же «штуке» равна и компонента Вy , но на сей раз это будет «xz-штука», a Bz, разумеется, равна «yx-штуке». Таким образом,
Посмотрим теперь, что получится, если мы попытаемся смастерить «штуки» типа «t», т. е. Fxt или Ftz (ведь природа должна быть красива и симметрична по х, у, z и t). Что такое, например, Ftz? Разумеется, она равна
Но вспомните, ведь At=φ, поэтому предыдущее выражение равно
Такое выражение нам уже встречалось раньше. Это почти z-компонента поля Е. Почти, за исключением неверного знака. Впрочем, мы забыли, что в четырехмерном градиенте производная по t идет со знаком, противоположным производным по х, у и z. Так что на самом деле нам следует взять более умное обобщение, т. е. считать
Теперь она в точности равна – Ez. Так же можно построить Ftx и Fty и получить три выражения:
А что, если оба индекса внизу будут t? Или оба будут х? Тогда мы получим выражения типа
т. е. просто нуль.
Итак, у нас есть шесть таких «F-штук». Кроме них, есть еще шесть полученных перестановкой индексов, но они не дают ничего нового, ибо
и т. п. Таким образом, из шести возможных попарных комбинаций четырех значений индексов мы получили шесть различных физических объектов, которые представляют компоненты В и Е.
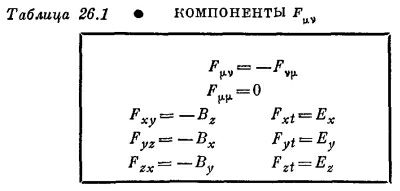
Чтобы записать члены F в общем виде, мы воспользуемся обобщенными индексами (μ и v, каждый из которых может быть 0, 1, 2 или 3, обозначающих соответственно (как и в обычных четырехвекторах) t, x, у или z. Кроме того, все будет прекрасно согласовываться с нашими четырехмерными обозначениями, если Fμv определить как
помня при этом, что
То, что мы нашли, можно сформулировать так: в природе существуют шесть величин, которые представляют различные стороны чего-то одного. Электрическое и магнитное поля, которые в нашем обычном медленно движущемся мире (где нас не беспокоит конечность скорости света) рассматривались как совершенно отдельные векторы, в четырехмерном пространстве уже не будут ими. Они — часть некоторой новой «штуки». Наше физическое «поле» на самом деле шестикомпонентный объект Fμv . Вот как обстоит дело в теории относительности. Полученные результаты для Fμv собраны в табл. 26.1.
 |
Вы видите, что мы сделали фактически обобщение векторного произведения. Мы начали с ротора и с того факта, что его свойства преобразования в точности такие же, как свойства преобразования двух векторов — обычного трехмерного вектора А и оператора градиента, который, как нам известно, ведет себя подобно вектору. Возвратимся на минуту к обычному векторному произведению в трехмерном пространстве, например к моменту количества движения частицы. При движении частицы в плоскости важной характеристикой оказывается комбинация (xvy— yvx), а при движении в трехмерном пространстве появляются три подобные величины, которые мы назвали моментом количества движения:
Затем (хотя сейчас вы, может быть, об этом и забыли) мы сотворили в гл. 20 (вып. 2) чудо: эти три величины превратились в компоненты вектора. Чтобы сделать это, мы приняли искусственное соглашение: правило правой руки. Нам просто повезло. И повезло потому, что момент L¡j (¡ и j равны х, у или z) оказался антисимметричным объектом, т. е.
 |
Из девяти возможных его величин независимы лишь три. И вот оказалось, что при изменении системы координат эти три оператора преобразуются в точности, как компоненты вектора.
То же свойство позволяет записать в виде вектора и элемент поверхности. Элемент поверхности имеет две части, скажем dx и dy, которые можно представить вектором da., ортогональным к поверхности. Но мы не можем сделать этого же для четырех измерений. Что будет нормалью к элементу dxdy? Куда она направлена — по оси r или по t?
Короче говоря, для трех измерений оказывается, что комбинацию двух векторов типа L¡j, к счастью, снова можно представить в виде вектора, поскольку возникают как раз три члена, которые, выходит, преобразуются подобно компонентам вектора. Для четырех измерений это, очевидно, невозможно, поскольку независимых членов шесть, а шесть величин вы никак не представите в виде четырех.
Однако даже в трехмерном пространстве можно составить такую комбинацию векторов, которую невозможно представить в виде вектора. Предположим, мы взяли какие-то два вектора а=(ах, ау, az) и b=(Ьx, by, bz) и составили всевозможные различные комбинации компонент типа axbx, ахby и т. д. Всего получается девять возможных величин:
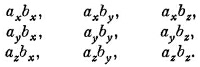 |
Эти величины можно назвать Т¡j.
Если теперь перейти в повернутую систему координат (скажем, относительно оси z), то при этом компоненты а и b изменяются. В новой системе ах должно быть заменено на
Аналогичные вещи происходят и с другими компонентами. Девять компонент изобретенной нами величины T¡j, разумеется, тоже изменяются. Например, Txy = axby переходит в
 |
Каждая компонента Т′¡j — это линейная комбинация компонент Т¡j.
Итак, мы обнаружили, что из векторов можно сделать не только векторное произведение aXb, три компоненты которого преобразуют подобно вектору. Искусственно мы из двух векторов Т¡j, можем сделать «произведение» другого сорта. Девять его компонент преобразуются при вращении по сложным правилам, которые можно выписать. Подобный объект, требующий для своего описания вместо одного индекса два, называется тензором. Мы построили тензор «второго ранга», но так же можно поступить и с тремя векторами и получить тензор третьего ранга, а из четырех векторов — тензор четвертого ранга и т. д. Тензором первого ранга является вектор.
Суть всего этого разговора в том, что наше электромагнитное поле Fμv — тоже тензор второго ранга, так как у него два индекса. Однако это уже тензор в четырехмерном пространстве. Он преобразуется специальным образом, и через минуту мы найдем его. Это просто произведение векторных преобразований. Если у тензора Fμv вы переставите индексы, то он изменит свой знак. Это особый вид тензора, и называется он антисимметричным. Иначе говоря, электрическое и магнитное поля являются частью антисимметричного тензора второго ранга в четырехмерном пространстве.
Вот какой мы прошли длинный путь. Помните, мы начали с определения, что такое скорость? А теперь мы уже рассуждаем о «тензоре второго ранга в четырехмерном пространстве».
Теперь нам нужно найти закон преобразования Fμv. Сделать это нетрудно — мороки только много,— шевелить мозгами особенно не нужно, а вот потрудиться все же придется. Единственное, что мы должны найти,— это преобразование Лоренца величины vμ Аv — vv Аμ . Так как vμ — просто специальный случай вектора, то мы будем работать с общей антисимметричной комбинацией векторов, которую можно назвать Gμv:
 |
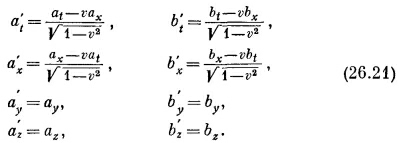
(Для наших целей аμ следует, в конце концов, заменить на vμ, а bμ — на потенциал Аμ.) Компоненты аμ и bμ преобразуются по формулам Лоренца:
Теперь преобразуем компоненты Gμv Начнем с Gtx:
Но ведь это просто Gtx. Таким образом, мы получили простой результат
Возьмем еще одну компоненту:
Итак, получается
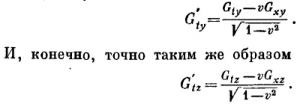
А теперь ясно, как ведут себя все остальные компоненты. Давайте составим таблицу преобразований всех шести членов; только теперь мы будем все писать для величин Fμv:
Разумеется, по-прежнему у нас F′μv = –F′vμ, a Fμμ=0.
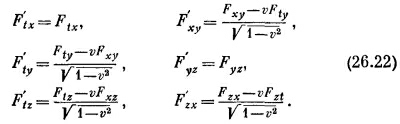
Итак, мы имеем преобразования электрических и магнитных полей. Единственное, что нам нужно сделать,— это заглянуть в табл. 26.1 и узнать, что означает для векторов Е и В преобразование, записанное для Fμv. Речь идет о простой подстановке. Чтобы можно было видеть, как это все выглядит в обычных символах, перепишем наши преобразования компонент поля в виде табл. 26.2.
Уравнения в этой таблице говорят нам, как изменяются Е и В при переходе от одной инерциальной системы к другой. Если известны Е и В в одной системе, то мы можем найти, чему они равны в другой, движущейся относительно нее со скоростью v.
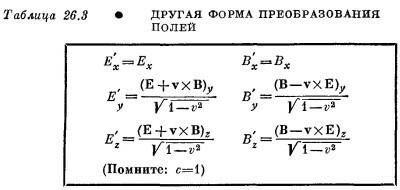
Можно переписать эти уравнения в форме, более легкой для запоминания. Для этого заметьте, что поскольку скорость v направлена по оси х, то все компоненты с v представляют собой векторные произведения vxE и vXB. Так что преобразования можно записать в виде табл. 26.3.
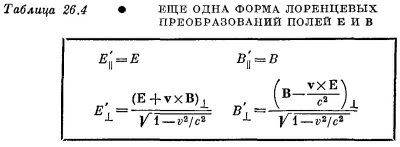
Теперь легко запомнить, какая компонента куда идет. Фактически эти преобразования можно записать даже еще проще, если ввести компоненты поля, направленные по оси х, т. е. «параллельные» компоненты Е|| и В|| (которые параллельны относительной скорости систем S и S′) и полные поперечные или «перпендикулярные» компоненты Е| и B|, т. е. векторную сумму у- и z-компонент. В результате мы получим уравнения, сведенные в табл. 26.4. (Для полноты мы восстановили все с.)
 |
Преобразования поля позволяют по-другому решить задачи, которыми мы занимались прежде, например найти поле движущегося точечного заряда. Раньше мы вычисляли поля, дифференцируя потенциалы. Но теперь то же самое можно сделать, преобразуя кулоново поле. Если у нас в системе S находится покоящийся заряд, то он создает только простое радиальное поле Е. В системе S′, движущейся относительно системы S со скоростью v=–и, точечный заряд будет казаться нам летящим со скоростью и. Покажите сами, что преобразования табл. 26.3 и 26.4 дают те же самые электрические и магнитные поля, которые мы получили в § 2.
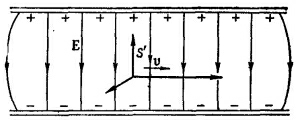 Преобразования табл. 26.2 дают нам очень интересный и простой ответ на вопрос: что мы видим, если движемся мимо любой системы фиксированных зарядов? Пусть нам хочется узнать поля в нашей системе S′, если мы движемся между пластинами конденсатора вдоль него, как показано на фиг. 26.7. (Но, разумеется, все равно, если бы заряженный конденсатор двигался мимо нас.) Что же мы увидим? Преобразования в этом случае облегчаются тем, что в первоначальной системе поле В отсутствует. Предположим сначала, что наше движение перпендикулярно к направлению Е, при этом мы увидим поле E′ = E/√1–v2/c2, которое остается полностью поперечным. Но мы еще увидим и магнитное поле В′ =–vXE′/c2. (He удивляйтесь, что в этой формуле нет √1–v2; ведь мы записали ее через Е′, а не через Е; так тоже можно делать.) Итак, когда мы движемся в направлении, перпендикулярном к статическому полю, то видим измененное Е и вдобавок еще поперечное поле В. Если наше движение не перпендикулярно вектору Е, то мы разбиваем Е на Е|| и Е|. Параллельная часть остается неизменной, Е′||=Е||, а что происходит с перпендикулярной компонентой, мы уже описали. Преобразования табл. 26.2 дают нам очень интересный и простой ответ на вопрос: что мы видим, если движемся мимо любой системы фиксированных зарядов? Пусть нам хочется узнать поля в нашей системе S′, если мы движемся между пластинами конденсатора вдоль него, как показано на фиг. 26.7. (Но, разумеется, все равно, если бы заряженный конденсатор двигался мимо нас.) Что же мы увидим? Преобразования в этом случае облегчаются тем, что в первоначальной системе поле В отсутствует. Предположим сначала, что наше движение перпендикулярно к направлению Е, при этом мы увидим поле E′ = E/√1–v2/c2, которое остается полностью поперечным. Но мы еще увидим и магнитное поле В′ =–vXE′/c2. (He удивляйтесь, что в этой формуле нет √1–v2; ведь мы записали ее через Е′, а не через Е; так тоже можно делать.) Итак, когда мы движемся в направлении, перпендикулярном к статическому полю, то видим измененное Е и вдобавок еще поперечное поле В. Если наше движение не перпендикулярно вектору Е, то мы разбиваем Е на Е|| и Е|. Параллельная часть остается неизменной, Е′||=Е||, а что происходит с перпендикулярной компонентой, мы уже описали.
Давайте разберем противоположный случай и вообразим, что мы движемся через чисто статическое магнитное поле. На этот раз мы бы увидели электрическое поле Е′, равное vXB′, и магнитное поле, усиленное множителем 1/√1–v2/c2 (предполагая, что оно поперечное). До тех пор, пока v много меньше с, изменением магнитного поля можно пренебречь, и основным эффектом будет появление электрического поля. В качестве примера этого эффекта рассмотрим некогда знаменитую проблему определения скорости самолета. Сейчас она уже больше не знаменита, поскольку для определения скорости можно использовать отражение от Земли сигналов радиолокатора. Но раньше в плохую погоду скорость самолета было очень трудно определить. Ведь вы не видите Землю и не можете сказать куда вы летите. А знать, насколько быстро вы движетесь относительно Земли, было важно. Как же это можно сделать, не видя ее? Те, кому были знакомы уравнения преобразования, считали, что нужно использовать тот факт, что самолет движется в магнитном поле Земли. Предположим, что самолет летит там, где магнитное поле нам более или менее известно. Возьмем простейший случай, когда магнитное поле вертикально. Если мы летим через него с горизонтальной скоростью v, то в соответствии с нашей формулой должны наблюдать электрическое поле vxB, т. е. перпендикулярное к направлению движения. Если поперек самолета подвесить изолированный провод, то электрическое поле на его концах будет индуцировать заряды. Ну в этом ничего нового нет. С точки зрения наблюдателя на Земле, мы просто передвигаем провод в магнитном поле, а сила q(v х В) заставляет заряд двигаться к концу провода. Уравнения преобразования говорят то же самое, но другими словами. (То, что одну и ту же вещь можно получить не одним, а несколькими способами, вовсе не означает, что один способ лучше другого. Мы овладели столькими методами и приемами, что один и тот же результат можем получать какими хотите способами!)
Итак, единственное, что мы должны сделать для определения скорости v,— это измерить напряжение между концами провода. Хотя для этой цели мы не можем воспользоваться вольтметром, ибо то же самое поле будет действовать и на провода внутри вольтметра, способы измерения таких полей все же существуют. О некоторых из них мы уже говорили в гл. 9 (вып. 5), когда рассказывали об атмосферном электричестве. Так что измерить скорость самолета, казалось бы, можно.
Однако эта важная проблема не была решена таким методом. Дело в том, что величина электрического поля, которое при этом развивается,— порядка нескольких милливольт на метр. Измерить такие поля, конечно, можно, но вся беда в том, что они ничем не отличаются от любых других электрических полей. Поля, создаваемые движением через магнитное поле, нельзя отличить от электрических полей, возникающих в воздухе по каким-то другим причинам (скажем, от электростатических зарядов в воздухе или на облаках). В гл. 9 мы говорили, что обычно над поверхностью Земли существуют электрические поля с напряженностью около 100 в/м, но они совершенно нерегулярные. Так что самолет во время полета будет наблюдать флуктуации атмосферных электрических полей, которые огромны по сравнению со слабенькими полями, возникающими из-за множителя vxB. Ввиду этих чисто практических причин измерить скорость самолета, используя его движение в магнитном поле Земли, невозможно.
СМОТРИТЕ ТАКЖЕ:
Социальные комментарии Cackle
|