Главная >> Фейнмановские лекции по физике >> Том 8 >> Глава 4. Спин одна вторая Произвольные повороты 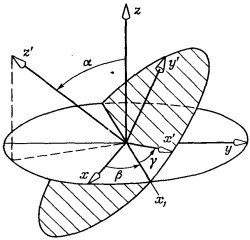 Теперь уже понятно, как быть с произвольным поворотом. Во-первых, заметьте, что любая относительная ориентация двух систем координат может быть описана тремя углами (фиг. 4.9). Если есть система осей х′, у′, z′ , ориентированных относительно х, у, z как угодно, то соотношение между ними можно описать тремя углами Эйлера α, β и γ, определяющими три последовательных поворота, которые переводят систему х, у, z в систему х′, у′, z′ . Отправляясь от х, у, z, мы поворачиваем нашу систему на угол β вокруг оси z, перенося ось х на линию х′. Затем мы проводим поворот на угол α вокруг этой временной оси х1, чтобы довести ось z до z′. Наконец, поворот вокруг новой оси z (т. е. вокруг z′) на угол γ переведет ось х1 в х′, а ось у в у′. Мы знаем преобразования для каждого из трех поворотов — они даются формулами (4.19) и (4.34). Комбинируя их в нужном порядке, получаем Теперь уже понятно, как быть с произвольным поворотом. Во-первых, заметьте, что любая относительная ориентация двух систем координат может быть описана тремя углами (фиг. 4.9). Если есть система осей х′, у′, z′ , ориентированных относительно х, у, z как угодно, то соотношение между ними можно описать тремя углами Эйлера α, β и γ, определяющими три последовательных поворота, которые переводят систему х, у, z в систему х′, у′, z′ . Отправляясь от х, у, z, мы поворачиваем нашу систему на угол β вокруг оси z, перенося ось х на линию х′. Затем мы проводим поворот на угол α вокруг этой временной оси х1, чтобы довести ось z до z′. Наконец, поворот вокруг новой оси z (т. е. вокруг z′) на угол γ переведет ось х1 в х′, а ось у в у′. Мы знаем преобразования для каждого из трех поворотов — они даются формулами (4.19) и (4.34). Комбинируя их в нужном порядке, получаем
 |
Итак, начав просто с некоторых предположений о свойствах пространства, мы вывели преобразование амплитуды при любом повороте. Это означает, что если нам известны амплитуды того, что любое состояние частицы со спином 1/2 перейдет в один из двух пучков прибора Штерна — Герлаха S с осями х, у, z, то мы можем подсчитать, какая часть перейдет в каждый пучок в приборе Т с осями x′, у′ и z′. Иначе говоря, если имеется состояние Ψ частицы со спином 1/2, у которого амплитуды пребывания вверху и внизу по отношению к оси z системы координат х, y, z равны С+=<+| Ψ> и С_ = <–|Ψ>, то тем самым мы знаем амплитуды С′+ и С′_ пребывания вверху и внизу по отношению к оси z′ любой другой системы x′, у′ и z′. Четверка коэффициентов в (4.35) — это члены «матрицы преобразования», с помощью которой можно проецировать амплитуды частицы со спином 1/2 в другие системы координат.
Теперь решим несколько примеров, чтобы посмотреть, как все это работает. Возьмем следующий простой вопрос. Пустим атом со спином 1/2 через прибор Штерна — Герлаха, пропускающий только состояние (+z). Какова амплитуда того, что атом окажется в состоянии (+x)? Ось +z — это все равно, что ось +z′ системы, повернутой на 90° вокруг оси у. Поэтому в этой задаче проще воспользоваться выражением (4.32), хотя, конечно, можно применить и полное уравнение (4.35). Поскольку С + = 1 и С_ =0, то получится С′+ =1/√ 2. Вероятности— это квадраты модулей этих амплитуд; таким образом, 50% шансов за то, что частица пройдет сквозь прибор, отбирающий состояние (+x). Если бы мы поинтересовались состоянием (—x), то амплитуда оказалась бы —1/√ 2, что опять дало бы вероятность 1/2, чего и следовало ожидать из симметрии пространства. Итак, если частица находится в состоянии (+z), то ей в равной степени вероятно побывать в состояниях (+x) и ( –х). Но фазы противоположны.
Ось у тоже без претензий. Частица в состоянии (+z) имеет равные шансы быть в состоянии ( + y) или (—y). Но теперь (согласно формуле для поворота на —90° вокруг оси х) амплитуды суть 1/√ 2 и –¡/√ 2. В этом случае разница в фазах двух амплитуд уже не 180°, как было для (+х) и (—х), а 90°. В этом-то и проявляется различие между х и у.
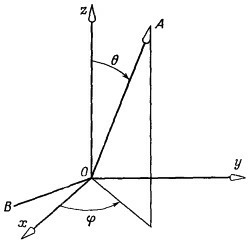 Вот еще пример. Пусть нам известно, что частица со спином 1/2 находится в состоянии Ψ, поляризованном вверх относительно оси А, определяемой углами θ и φ (фиг. 4.10). Мы хотим знать амплитуду < С+|Ψ > того, что частица относительно оси z окажется в состоянии «вверх», и амплитуду < С_|Ψ > того, что она окажется в состоянии «вниз» относительно той же оси z. Эти амплитуды мы можем найти, вообразив, что А есть ось z′ системы, у которой ось х′ направлена произвольно, скажем лежит в плоскости, образованной А и z. Тогда можно перевести систему А в систему х, у, z тремя поворотами. Во-первых, надо сделать поворот на —π/2 вокруг оси А, что переведет ось x в линию В на рисунке. Затем повернуть на — θ вокруг линии В (вокруг новой оси х′ системы А), чтобы ось А попала ни ось z. И, наконец, повернуть вокруг оси z на угол (π/2—φ). Вот еще пример. Пусть нам известно, что частица со спином 1/2 находится в состоянии Ψ, поляризованном вверх относительно оси А, определяемой углами θ и φ (фиг. 4.10). Мы хотим знать амплитуду < С+|Ψ > того, что частица относительно оси z окажется в состоянии «вверх», и амплитуду < С_|Ψ > того, что она окажется в состоянии «вниз» относительно той же оси z. Эти амплитуды мы можем найти, вообразив, что А есть ось z′ системы, у которой ось х′ направлена произвольно, скажем лежит в плоскости, образованной А и z. Тогда можно перевести систему А в систему х, у, z тремя поворотами. Во-первых, надо сделать поворот на —π/2 вокруг оси А, что переведет ось x в линию В на рисунке. Затем повернуть на — θ вокруг линии В (вокруг новой оси х′ системы А), чтобы ось А попала ни ось z. И, наконец, повернуть вокруг оси z на угол (π/2—φ).
Вспоминая, что вначале было только одно состояние (+) по отношению к А, получаем
 |
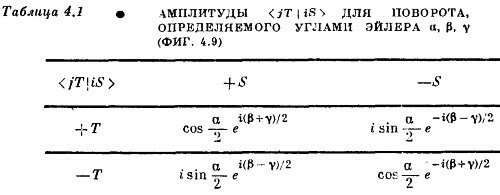
Мы хотели бы напоследок подытожить результаты этой главы в форме, которая окажется полезной для нашей дальнейшей работы. Во-первых, напомним, что наш основной результат (4.35) может быть записан в других обозначениях. Заметьте, что (4.35)— это то же самое, что и (4.4) Иначе говоря, в (4.35) коэффициенты при С+ = <+S |Ψ> и С_ = <–S |Ψ> суть как раз амплитуды <jT |iS> в (4.4), амплитуды того, что частица в состоянии i по отношению к S окажется в состоянии j по отношению к Т (когда ориентация Т по отношению к S дается углами α, β и γ). Мы их также называли RTSji в выражении (4.6). (Чего-чего, а обозначений у нас хватало!) Например, RTS_ + = < –T |S> — это коэффициент при С + в формуле для С′_ , а именно i sin(α/2) exp[ ¡(β—γ)/2] . Поэтому сводку наших результатов мы можем дать в виде табл. 4.1.
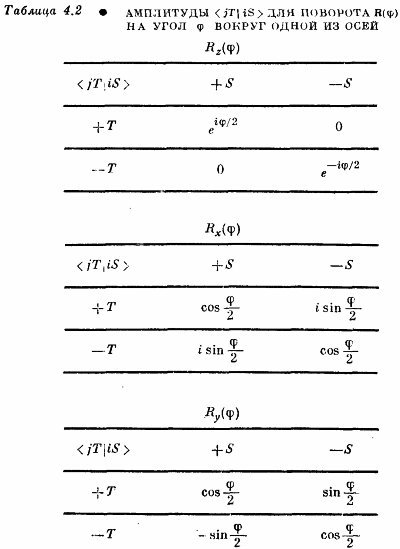
Было бы удобно иметь эти амплитуды расписанными для некоторых особо важных случаев. Пусть Rz(φ) — поворот на угол φ вокруг оси z. Так же можно обозначить и соответствующую матрицу поворота (опуская молчаливо подразумеваемые индексы i и j). В том же смысле Rx(φ) и Ry(φ) будут обозначать повороты на угол φ вокруг оси х и оси у.
В табл. 4.2 мы приводим матрицы — таблицы амплитуд <jT |iS>, которые проецируют амплитуды из системы S в систему Т, где Т получается из S указанным поворотом.
СМОТРИТЕ ТАКЖЕ:
Социальные комментарии Cackle
|