|
|
Физика - одна из самых удивительных наук! Физика столь интенсивно развивается, что даже лучшие педагоги сталкиваются с большими трудностями, когда им надо рассказать о современной науке. Данный ресурс поможет эффективно и интересно изучать физику. Учите физику! |
|||
| полезное |
|---|
| Смешные анекдоты о физике
Готовые шпоры по физике Физика в жизни Ученые и деньги Нобелевские лауреаты Фото Видео Карта сайта |
| На заметку |
|---|
| Если вам понравился сайт, предлагаем разместить нашу кнопку |
| Дополнительно |
|---|
|
Компьютерные программы по физике 
Физика и юмор 
Онлайн тестирование по физике 
|
Преобразование к другому базису
Мы хотим сделать одно заключительное замечание относительно базисных состояний, используемых в расчетах. Предположим, мы захотели работать с каким-то определенным базисом, скажем с базисом S, а кто-то другой решает провести те же расчеты с другим базисом, скажем с базисом Т.
Чтобы связать оба представления, нужно задать только девять комплексных чисел —матрицу <jT | iS>. Эту матрицу затем можно использовать для того, чтобы перевести все его уравнения в нашу форму. Она сообщает нам, как преобразовать одну совокупность базисных состояний в другую. (По этой причине <jT | iS> иногда именуют «матрицей преобразования от представления S к представлению T». Слова ученые!)
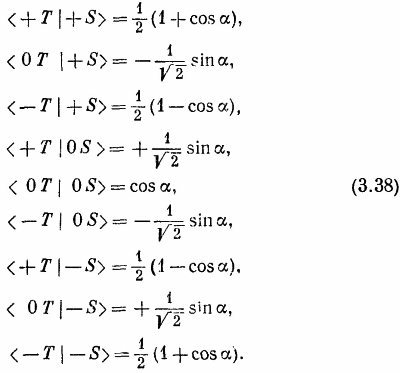
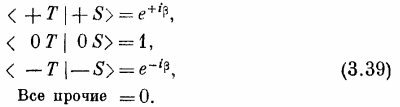
Второй случай. Прибор Т имеет ту же ось z, что и S, но повернут относительно оси z на угол β. (Преобразование координат: z′=z; х′ =xсоs β + y sin β; у′ = у cos β — x sin β.) Тогда амплитуды преобразований суть
Заметьте, что любые вращения Т можно составить из описанных двух вращений.
и если то же состояние описывается с точки зрения Т тремя числами
тогда коэффициенты < jТ | iS > из (3.38) и (3.39) дают преобразования, связывающие С¡ и C′¡ Иными словами, С¡ очень походят на компоненты вектора, который с точек зрения S и Т выглядит по-разному.
преобразуются в С′х , С′у , C′z как раз так же, как х, у, z преобразуются в х′, у′, z′. [Вы можете проверить это с помощью законов преобразований (3.38) и (3.39).] Теперь вы понимаете, почему частицу со спином 1 часто называют «векторной частицей». СМОТРИТЕ ТАКЖЕ:Социальные комментарии Cackle |




При использовании материалов сайта ссылка на www.all-fizika.com обязательна.